I worked with some amazing people while on location in Namibia, Africa and in pre-production in Sydney, Australia.
The Buzzards Excavator truck was one of the stunt rigs I worked on. The War Boys Jaguar is lodged on the front of the truck as it rams into the back, just before it’s ripped apart by an explosion.
In a gag where the War Boys tow truck is rolled by the war rig, I assisted in the design and fabrication of the 10 ton hydraulic actuator that mounts underneath the vehicle to lift one side until it topples over.
On set, we filled high pressure nitrogen accumulators inside the truck that provide the kinetic energy for the hydraulic system.
I designed and fabricated the prototype and full production of 400 units as part of a kinetic wall. The 15 ft x 20 ft wall is broken into 5 units that fold in half to ship in an 8 ft tall crate. On site the wall is un-crated and linear actuators unfold each section, saving time and labor.
I designed and prototyped the actuators used in Diffusion Choir. Based off the same principal as a common winged wine bottle corkscrew, each element uses a nema 11 stepper motor to drive 6 radially arranged rack and pinion arms that open and close each unit.
I spent a long time on this lift, 120 ft up in the air. You get used to it after a while.
Early Prototype
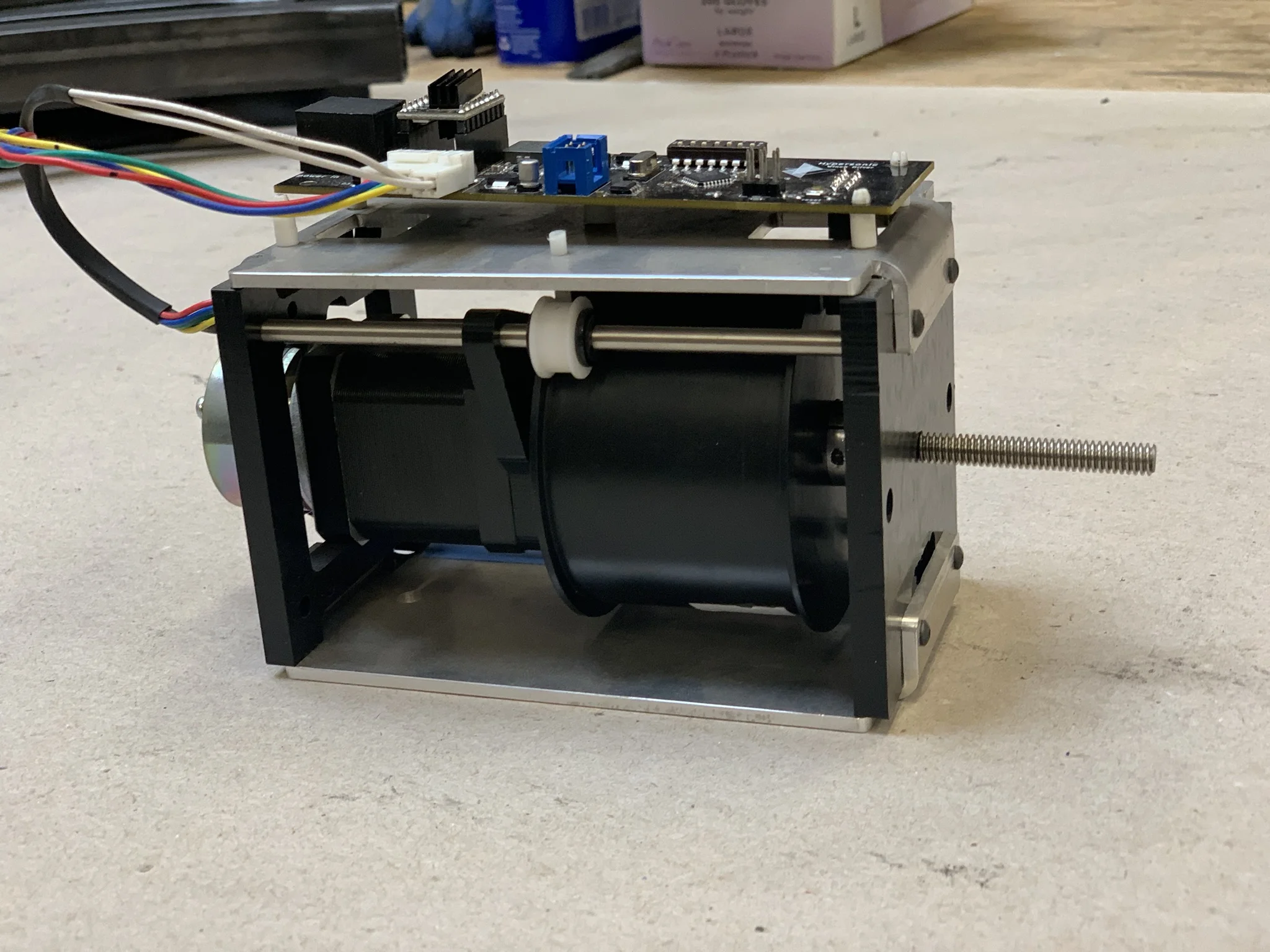
I designed and prototyped several iterations of these zero fleet winches. Each unit uses a nema 17 stepper motor with a power off brake to hoist loads up to half a pound 26 ft in the air.
Prototype II
Prototype I
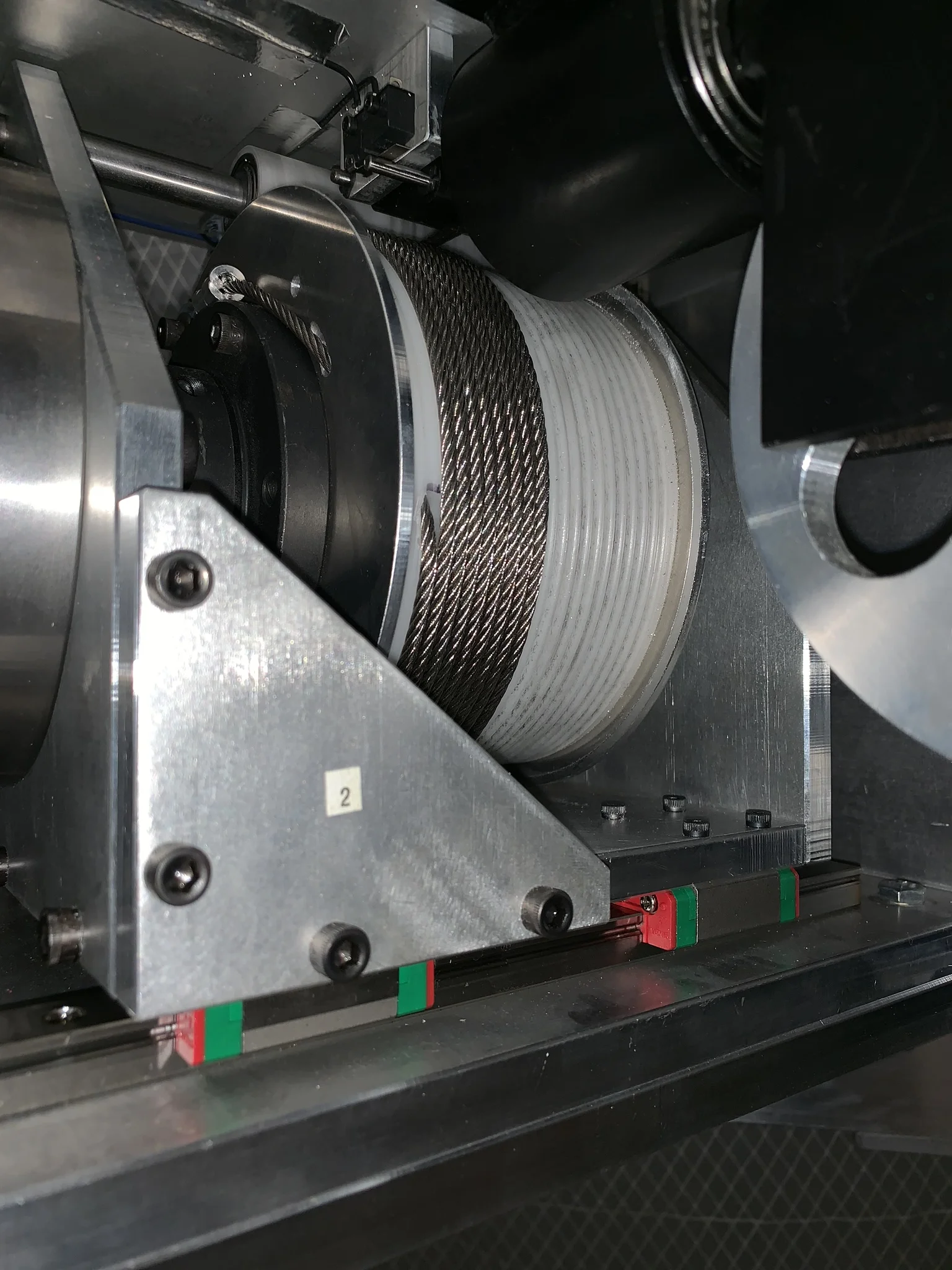
This is a much larger 600 watt version of a similar design using 3mm wire rope. The application uses 4 winches tethered to a single point to manipulate a load in 3 dimensions. I made the prototypes as well as the production units.
I designed, prototyped, and fabricated the actuator used the Seed and Signal wall at Hypersonic’s studio in Brooklyn.
Each unit was actuated by a nema 11 stepper motor with a high feed leadscrew. The piece is completely silent due to ultra quiet stepper motor drivers from Trinamic and the addition of a rotating mass damper on the back of each stepper motor.
The two toned lenticular “wings” were fabricated on the CNC router in two setups. One for the rough shaping followed by paint, the other to remove the paint of one face of each of the ridges and cut the profile.
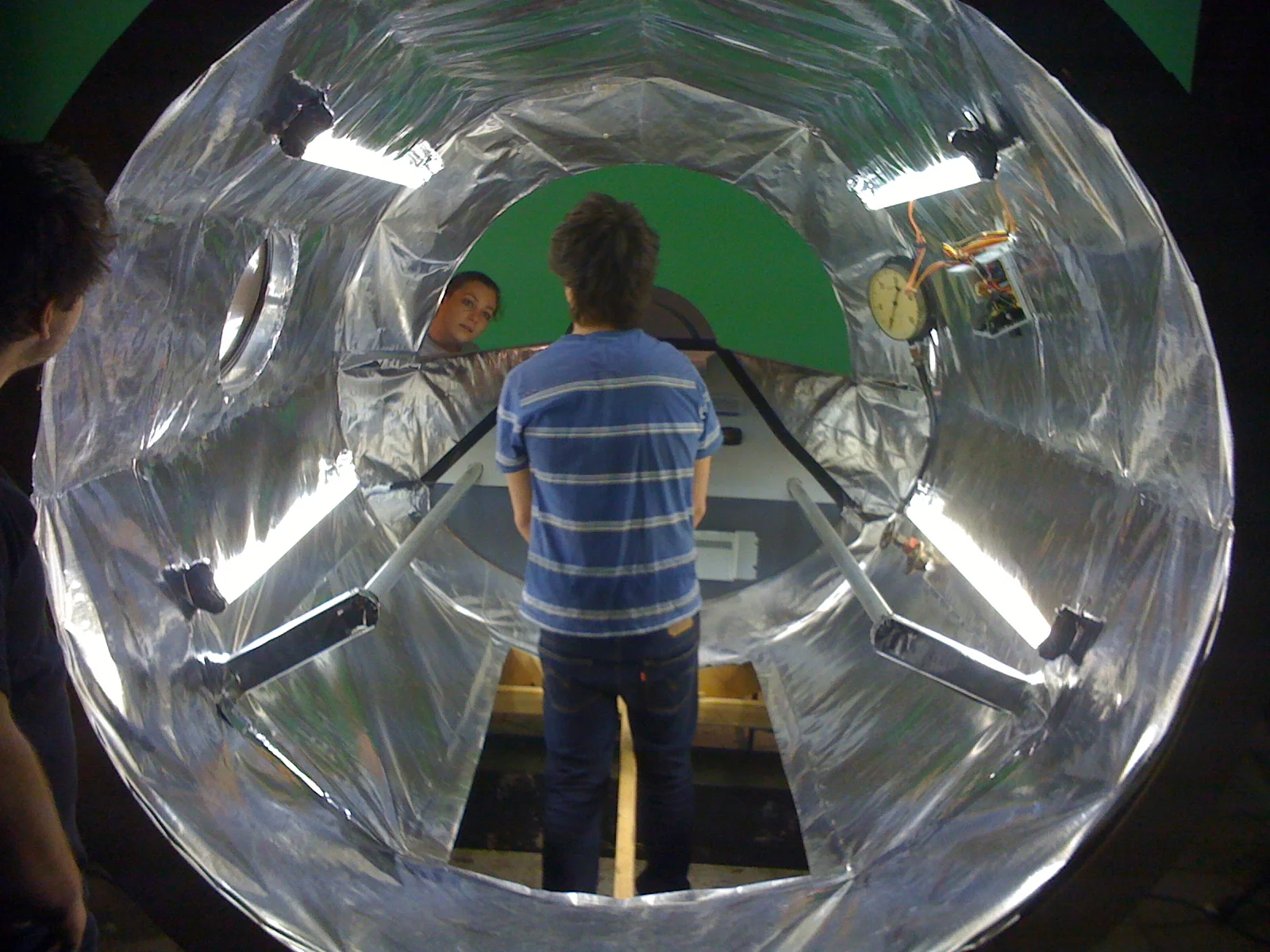
I was part of the assembly team that fabricated the custom rings used in the opening ceremony of the 2010 Vancouver Winter Olympics.
Each ring was equipped with pneumatic cannons that shoot snow and vibrators that shake snowflakes over the athletes during the performance.
I designed and fabricated a trolley for use on an enormous abandoned zipline that some stunt riggers and I came across while working in Namibia. It was strung between two mountains 1 mile apart.
Designed in Solidworks, the pulleys were CNC plasma cut from 1” steel plate and then finish turned for profile and bearings on the manual lathe. The stainless steel cheek plates were also CNC plasma cut.
I designed and fabricated these from 1/2” 6061 aluminum and brass. Designed in Solidworks, toolpaths done in HSM Works and cut on a Shopbot PRS Alpha.